OSEK,汽车电子开放式系统及其接口,全称Offene Systeme and deren Schnittstellen fur dieElektronik im Kraftfahr-zeug体系),由1993年德国汽车工业界提出。这个体系的最早倡导者有:宝马、博世、戴姆勒克莱斯勒、欧宝、西门子、大众等,看,AUOTSAR核心成员也是他们。反复被收割。它主要由四部分组成:操作系统规范(OSEK Operating System,OSEK OS)、通信规范(OSEK Communication , OSEK COM )、网络管理规范( OSEK Net Management, OSEK NM)和OSEK实现语言(OSEK Implementation Language,OIL)。
我们今天来看看OSEK OS,主要是通过这个介绍来理解AUTOSAR OS
1.OSEK OS架构
OSEK OS定义了三种处理等级:中断等级、调度器等级、任务等级。
在任务级别下,task由预先定义的优先级执行。在执行开始时,Runtime上下文被占用,任务运行完毕后再次释放。
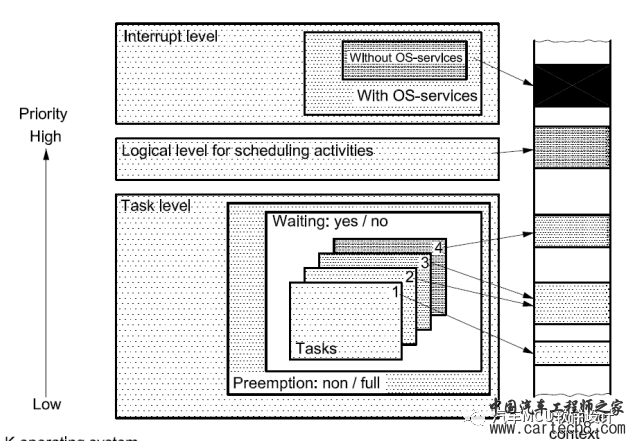
常用的优先级规则如下:
中断优先于task
中断处理级别由一个或多个中断优先级级别组成
中断服务例程具有静态分配的中断优先级。
中断服务例程对中断优先级的分配取决于实现和硬件架构
对于任务优先级和天花板优先级,数字越大优先级越高
任务优先级由用户分配
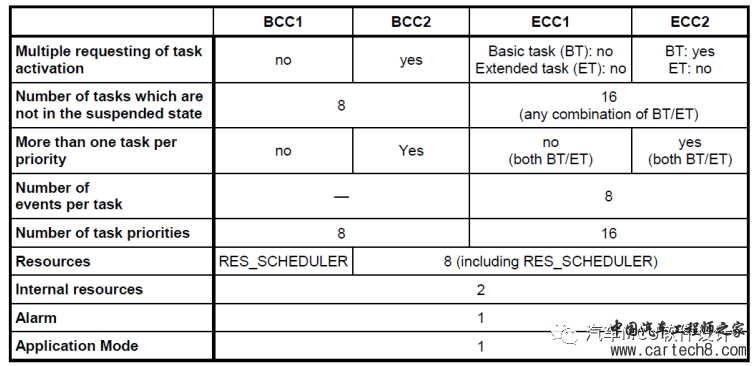
OS等级定义如下:
BCC1:仅仅支持basic task,每个任务只能有一个激活请求,每个优先级只能有一个任务,而所有任务都有不同的优先级
BCC2:与BCC1相似,与BCC1一样,每个优先级可能有多个任务,并且允许多个请求激活任务
ECC1:与BCC1相似,支持extended tasks
ECC2:与ECC1一样,每个优先级可能有多个任务,Basic Task允许多个请求任务激活
 2.OSEK Task Management
2.1 Basic task:
2.OSEK Task Management
2.1 Basic task:
只有在以下情况才会释放CPU:任务终止、OS切换到更高优先级的任务、中断触发核心切换至ISR(interrupt service routine)
2.2 Extended task
Extended task允许使用OS WaitEvent功能,等待状态允许释放核心并将其重新分配给优先级较低的任务,而无需终止正在运行的扩展任务。
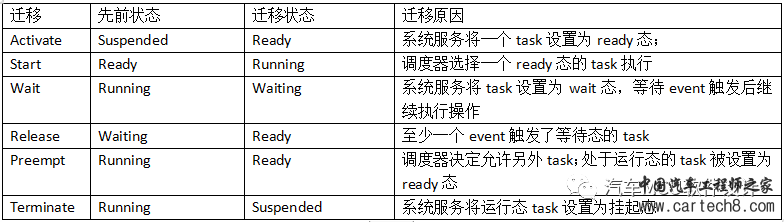
2.3 任务状态机
Extended task状态机如下:
运行态(running):处于运行态时,cpu被当前task占用,该task指令被执行;任何时间都只能有一个task处于该状态;
准备态(Ready):满足转换到运行态的所有前置条件,任务只等待处理器的分配。调度器决定下一步执行哪个ready任务
等待态(Waiting):处于该状态的任务在等待一个event,该任务不会执行;
挂起态(Suspended):处于该状态的任务可以被激活,
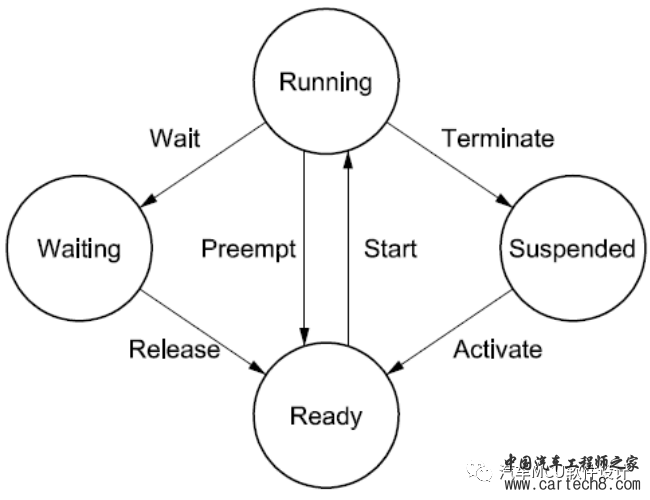
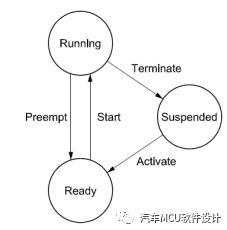
状态迁移条件图:
Basic task状态机如下:
调度器:决定应启动哪个任务。根据调度策略,只要可以切换任务,就会激活调度器。调度器可以被视为一种资源,可以被任务占用和释放。因此,任务可以占用调度器以避免任务切换,直到释放为止。
2.4 任务优先级
BCC2和ECC2等级的OS支持相同优先级的task。具有相同优先级的任务根据其激活顺序启动,因此处于等待状态的扩展任务不会阻止具有相同优先级的后续任务的启动。
抢占任务是其当前优先级的ready列表中的第一个(最早的)任务
从等待状态释放的任务被视为其优先级就绪队列中的最新任务。
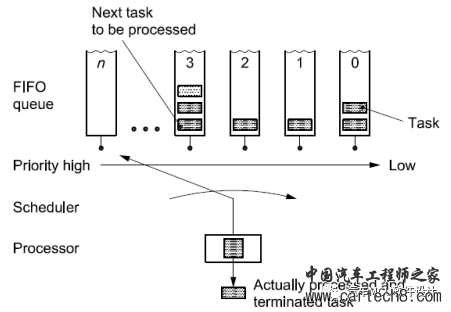
下图显示了使用每个优先级的队列的调度器的示例实现。若干不同优先级的任务处于就绪状态;三个优先级为3的任务,一个优先级为2,一个优先级为1,再加上两个优先级为0的任务。根据请求的顺序,等待时间最长的任务显示在每个队列的底部。处理器刚刚处理并终止了一个任务。调度器选择要处理的下一个任务(优先级3,第一个队列)。
假设现在要想处理优先级为2的task,那么所有优先级较高的任务应已离开running态和ready状态(task被执行完毕并且调用terminatred、或者切换到waiting状态从而从队列中移除)。
切换到下个任务的基本步骤如下:
调度器查找所有处于Ready或者running状态的task
调度器根据处于就绪/运行状态的任务集确定具有最高优先级的任务集。
在处于就绪/运行状态且具有最高优先级的任务集中,调度程序会查找最旧(FIFO)的任务
3.调度策略
3.1 完全抢占策略
完全抢占式调度是指当前正在运行的任务可以根据操作系统预先设置的触发条件在任何指令下重新调度。一旦高优先级任务准备就绪,完全抢占式调度就会将正在运行的任务置于就绪状态。保存任务上下文,以便抢占的任务可以在其被抢占的位置继续。在完全抢占系统的情况下,用户应始终期望抢占正在运行的任务。如果该任务不想被抢占,可以通过GetResource临时阻止调度器来实现。
再调度可以由如下case实现:
TerminateTask:终止一个task
ChainTask:通过显式激活后续任务成功终止任务
ActiveteTask:任务级别激活task
WaitEvent:仅扩展任务支持,在task层面设置一个event给处于waiting态的任务
ReleaseResource:任务层面释放resource
从中断层级返回到task层级
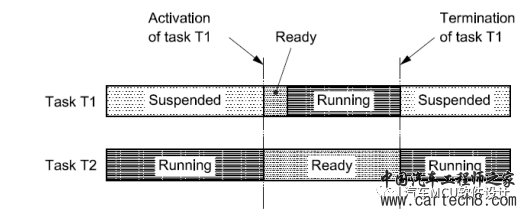
3.2 非抢占式调度
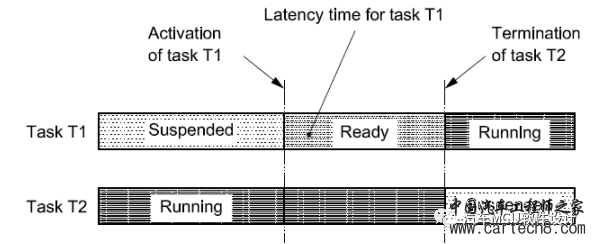
简单讲,如上图,优先级高的taskT1 会因为TaskT2的运行而delay
3.3 混合式调度
一个系统包含抢占式和非抢占式的任务。这种情况下,调度策略依赖于当前运行task的属性;如果当前task是非抢占式的, 那么调度策略使用非抢占式调度,如果当前task是抢占式的,就使用抢占式策略。PS:这个要与Task groups作区分:Task groups是指操作系统允许任务通过定义任务组来结合抢占式和非抢占式调度的各种特性。对于优先级与组内最高优先级相同或更低的任务,该任务表现为不可抢占的任务。对于优先级高于组内最高优先级的任务,任务的行为类似于可抢占任务。
4. Application Mode
应用程序模式旨在允许操作系统在不同的操作模式下运行。支持的应用程序模式的最小数量为一种。仅适用于完全互斥的操作模式。两种排他性操作模式的一个示例是线端编程和正常操作。操作系统启动后,不允许更改应用模式
许多ECU可以执行完全独立的应用程序,例如工厂测试、闪存编程或正常操作。应用模式是根据这些不同的条件构造ECU中运行的软件的一种手段,也是开发完全独立系统的一种干净机制。通常,每个应用程序模式都使用其自己的所有任务、ISR、警报和计时条件子集,但不限制任务或ISR在不同模式下运行。如果再次需要相同的功能,建议在不同模式之间共享任务/ISR/警报。如果功能不完全相同,则在运行时和资源之间存在权衡:要么动态检查应用程序模式,要么定义单独的任务。
回复:<br><br>关于OSEK OS的介绍:<br><br>OSEK,即汽车电子开放式系统及其接口体系,是德国汽车工业界于1993年提出的一种标准化汽车电子系统架构。其核心成员包括宝马、博世、戴姆勒克莱斯勒等知名汽车厂商。OSEK OS作为该体系的重要组成部分,是操作系统规范的核心,为汽车电子控制单元的软件提供了标准化的开发平台和接口。其主要特点是实时性强、可靠性高、安全性好,广泛应用于现代汽车的各类控制系统中。此外,OSEK OS还支持模块化的软件架构设计,有助于提升系统的灵活性和可扩展性。总体上,OSEK OS对于提升汽车电子系统的集成度和性能起到了重要作用。<br><br>(注:由于提供的文本内容有限,关于OSEK OS的其他细节和具体应用可能需要进一步的研究和补充。)
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) OSEK OS介绍(一)w1.jpg
OSEK OS介绍(一)w1.jpg