一、PID简介
1.1比例(P)控制
比例控制器实际上就是个放大倍数可调的放大器,即△P=Kp×e,式中Kp为比例增益,即Kp可大于1,也可小于1;e为控制器的输入,也就是测量值与给定值之差,又称为偏差。要说明的是,对于大多数模拟控制器而言,都不采用比例增益Kp作为刻度,而是用比例度来刻度,即δ=1/Kc×100%。也就是说比例度与控制器的放大倍数的倒数成比例;控制器的比例度越小,它的放大倍数越大,偏差放大的能力越大,反之亦然。明白了上述关系,就可知道比例度(即比例带)越大,控制器的放大倍数越小,被控参数的曲线越平稳;比例度越小,控制器的放大倍数越大,被控参数的曲线越波动。比例控制有个缺点,就是会产生余差,要克服余差就必须引入积分作用
1.2积分(I)控制
控制器的积分作用就是为了消除自控系统的余差而设置的。所谓积分,就是随时间进行累积的意思,即当有偏差输入e存在时,积分控制器就要将偏差随时间不断累积起来,也就是积分累积的快慢与偏差e的大小和积分速度成正比。只要有偏差e存在,积分控制器的输出就要改变,也就是说积分总是起作用的,只有偏差不存在时,积分才会停止。对于恒定的偏差,调整积分作用的实质就是改变控制器输出的变化速率,这个速率是通过积分作用的输出等于比例作用的输出所需的一段时问来衡量的。积分时间小,表示积分速度大,积分作用就强;反之,积分时问大,则积分作用就弱。如果积分时间无穷大,表示没有积分作用,控制器就成为纯比例控制器。实际上积分作用很少单独使用,通常与比例作用一起使用,使其既具有把偏差放大(或缩小)的比例作用,又具有将偏差随时间累积的积分作用,且其作用方向是一致的。这时控制器的输出为:△P=Ke+△Pi,式中△P为控制器输出值的变化;Ke为比例作用引起的输出;△Pi为积分作用引起的输出
1.3微分(D)控制
微分作用主要是用来克服被控对象的滞后,常用于温度控制系统。除采用微分作用外,在使用控制系统时要注意测量传送的滞后问题,如温度测量元件的选择和安装位置等。在常规PID控制器中,微分作用的输出变化与微分时间和偏差变化的速度成比例,而与偏差的大小无关,偏差变化的速度越大,微分时间越长,则微分作用的输出变化越大。但如果微分作用过强,则可能由于变化太快而由其自身引起振荡,使控制器输出中产生明显的“尖峰”或“突跳”。为了避免这一扰动,在PID调节器和DCS中可使用微分先行PID运算规律,即只对测量值PV进行微分,当人工改变控制器的给定值SP时,不会造成控制器输出的突变,避免了改变SP的瞬间给控制系统带来的扰动。如TDC-3000,则在常规PID算法中增加一个软开关,组态时供用户选择控制器对偏差、还是测量值进行微分。当输入阶跃信号后,微分器一开始输出的最大变化值与微分作用消失后的输出变化的比值就是微分放大倍数Kd,即微分增益,微分増益的单位是时间,设置微分时间(或者微分增益)为零会取消微分的功能。
1.4PID参数整定
PID参数整定式控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。主要可分为两大类:
理论计算整定方法:依据系统的数学模型,经过理论计算确定控制器参数。计算理论之后需要通过工程实践进行调整。
工程整定方法:依赖工程经验,直接在控制系统的试验中进行,方法简单,易于掌握,在工程实际中被广泛应用。
在永磁同步电机的控制系统中,主要采用PI控制器。
二、工程整定法
PI控制器的工程整定法,主要有:临界比例法、衰减曲线法。
2.1临界比例法
一个调节系统,在阶跃干扰作用下,出现既不发散也不衰减的等幅振荡过程,此过程称为等幅振荡,如下图1所示。此时调节器的比例度为临界比例度δk,被调参数的工作周期为为临界周期Tk。
PS:比例增益是指输出变化对偏差变化之比。而比例度则是指调节器的偏差值占输出值变化的百分比。这两种表示方法互为倒数关系,即:KP=1/δ。
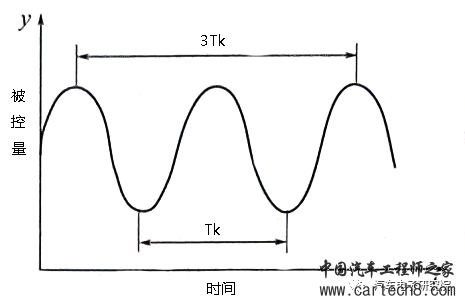
图1.临界振荡过程示意图
临界比例法操作步骤:
1)先把积分时间放至最大,微分时间放至零,比例度放至较大的适当值。“纯P转减参数”,就是使控制系统按纯比例作用的方式投入运行。然后慢慢地减少比例度,在外界干扰的作用下,细心观察调节器的输出信号和被调参数的变化情况;如果控制过程的曲线波动是衰减的,则把比例度继续调小,如果控制过程的曲线波动是发散的,则应把比例度调大些,直到曲线波动呈等幅振荡为止,以此得到临界振荡过程,从而得到临界比例度δk和临界周期Tk值。即口诀说的“等幅振荡出现时,δk值Tk值为临界”
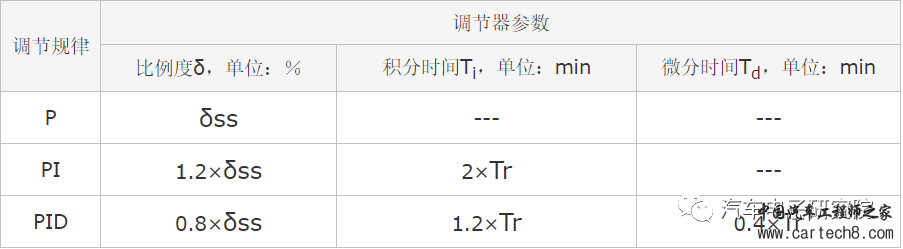
2)“按照公式乘系数”即根据得到的δk和Tk值按下表临界比例度法参数计算公式表,来计算调节器的各参数值。
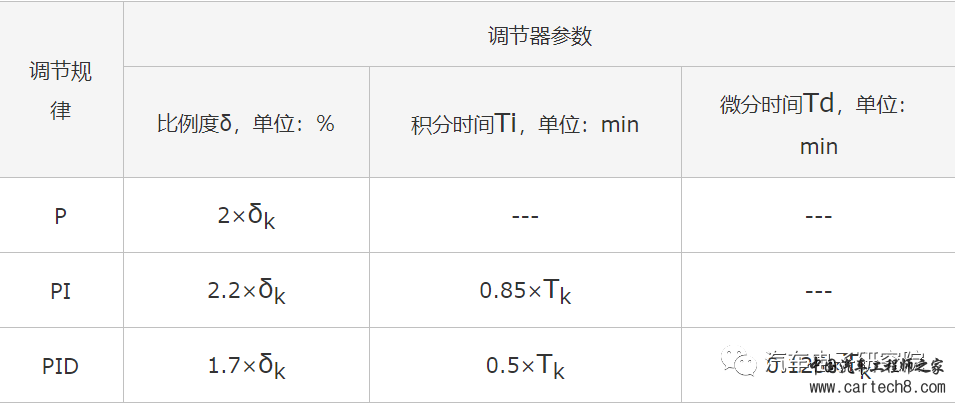
添加图片注释,不超过 140 字(可选)
3)求得具体的数值后,将比例度调在比计算数值大一些的刻度上,然后把积分时间放至计算值上,然后从大到小地调整积分时间,最后把微分时间放至计算值上,从小到大地调整微分时间。这样的调整次序就是口诀中的“PID序不能错”。
4)最后把比例度减小到计算值上,通过观察曲线,也就是“静观运行勤调整,细心寻求最佳值”。即适当地进行各参数的微调,以达到满意的控制效果。
2.2衰减曲线法
衰减曲线法整定调节器参数通常会按照4:1和10:1两种衰减方式进行,两种方法操作步骤相同,但分别适用于不同工况的调节器参数整定。
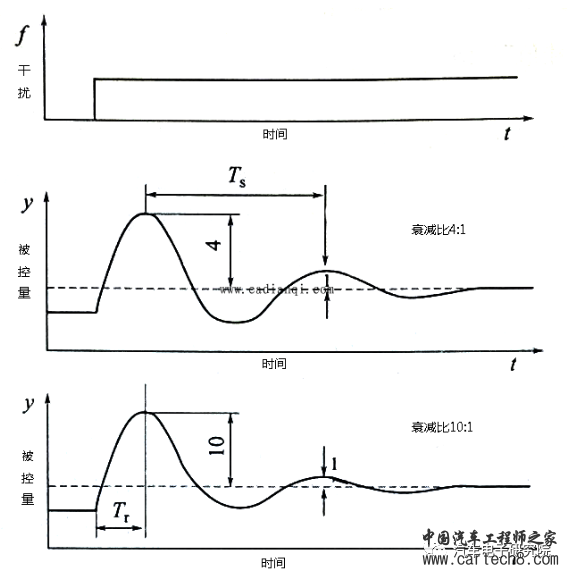
图2.阶跃输入下过渡过程衰减曲线
(1)4:1衰减法
纯比例度作用下的自动调节系统,在比例度逐渐减小时,出现4:1衰减振荡过程,此时比例度为4:1衰减比例度δs,两个相邻同向波峰之间的距离为4:1衰减操作周期TS。操作步骤如下:
1)将调节器积分时间设定为无穷大、微分时间设定为零(即Ti=∞,Td=0),比例度适当取值,调节系统按纯比例作用投入。系统稳定后,逐步减小比例度,根据工艺操作的许可程度加2%-3%的干扰,观察调节过程变化情况,直到调节过程变化达到规定的4:1衰减比为止,得到4:1衰减情况下的比例度δs和衰减操作周期TS。
2)根据δs和Ts值按以下公式计算出调节器整定参数
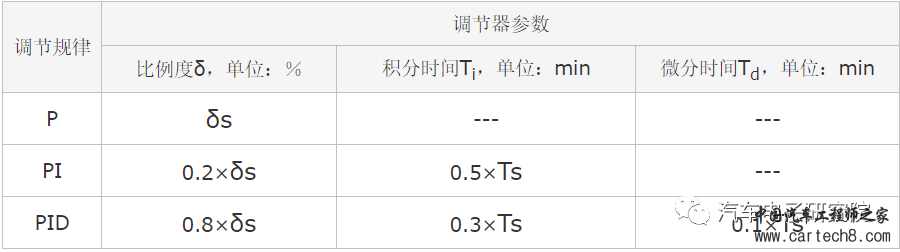
添加图片注释,不超过 140 字(可选)
3)将比例度放在比计算值略大的数值上,逐步引入积分和微分作用。
4)将比例度降至计算值上,观察运行,适当调整。
(2)10:1衰减法
在部分调节系统中,由于采用4:1衰减比仍嫌振荡比较厉害,则可采用10:1的衰减过程,这种情况下由于衰减太快,要测量操作周期比较困难,但可测取从施加干扰开始至第一个波峰飞升时间Tr。10:1衰减曲线法整定调节参数步骤和4:1衰减曲线法完全一致,仅采用的整定参数和经验公式不同。
添加图片注释,不超过 140 字(可选)
三、理论计算整定方法
3.1确定传递函数
在FOC控制中,控制多为2-3环,电流环基本作为内环存在,外环则根据实际工况进行选择。在电动助力制动系统中,内环为电流环,外环为压力环或减速度环。在电动助力转向系统中,当处于助力模式下,内环为一个电流闭环,外环为力矩开环;当处于主动转向模式下,内环为电流环,外环为位置环。此处主要针对电流环进行研究。
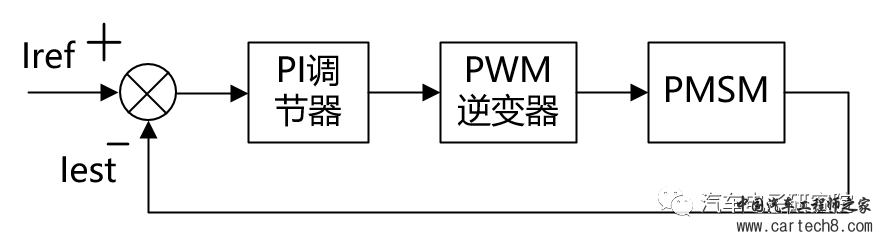
图3.电流环简化图
通过采样电阻,采集三相电流经过坐标变换换算为d、q轴电流信号,与电流给定值进行比较;通过PI调节器得到输出电压,经过SVPWM模块产生PWM波后,传送到逆变器;三相六桥开关控制PMSM。
可将图3中的电流环简化图转换成传递函数图形,见下图4及图5.
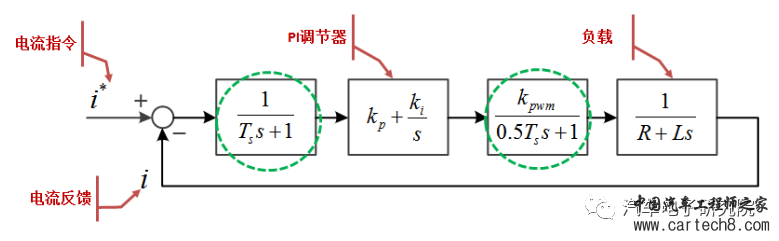
图4.电流环传递函数图(来源:陈老四)
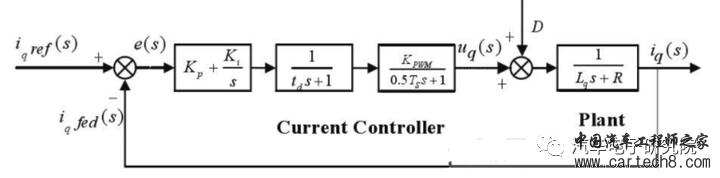
图5.电流环传递函数图
进行逐个分析:

3)对于图4中的两个绿框中环节,(来源:陈老四)给出的图形解释“在下图中,CPU在红色点处进入中断,读取了电流反馈值,然后进行PI调节器的计算,得到输出电压(或者三角波比较值)。但是输出电压不是立即作用出去的,通常会等到三角波回到0计数点,才会将比较值输出出去。这样就造成了采样和计算的延时,也就是第一个绿色虚框中的一阶延时Ts。输出的电压是立刻作用到了负载上面吗?还不是的。输出的比较值和三角波进行比较,产生PWM信号,上图中的橘黄色线。对于这种7段式SVPWM来说,调制特点决定了还有0.5Ts的延时,也就是第二个绿色虚框中的分母部分。”KPWM 表示逆变器的放大倍数。

图6(来源:陈老四)
在之前自己写的论文里,也做过类似的电流采样和占空比更新的时序分析,见下图7。(有区别,之后有机会可以分析一下)。
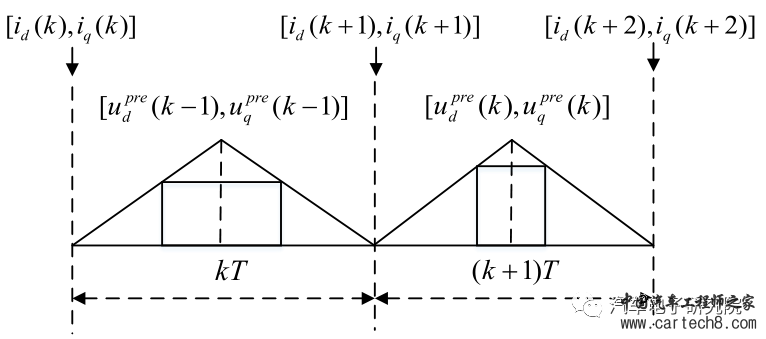
图7.Sequence diagram of current sampling and duty cycle update
PS:在很多场合,电流反馈通道中有滤波,则原传递函数不再是单位反馈,反馈通道会多一个一阶惯性环节,存在滤波时间常数。

添加图片注释,不超过 140 字(可选)
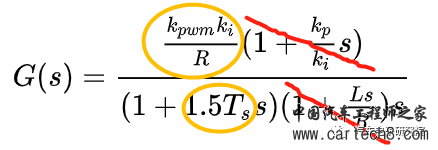
综上,确定电流环的开环传递函数:
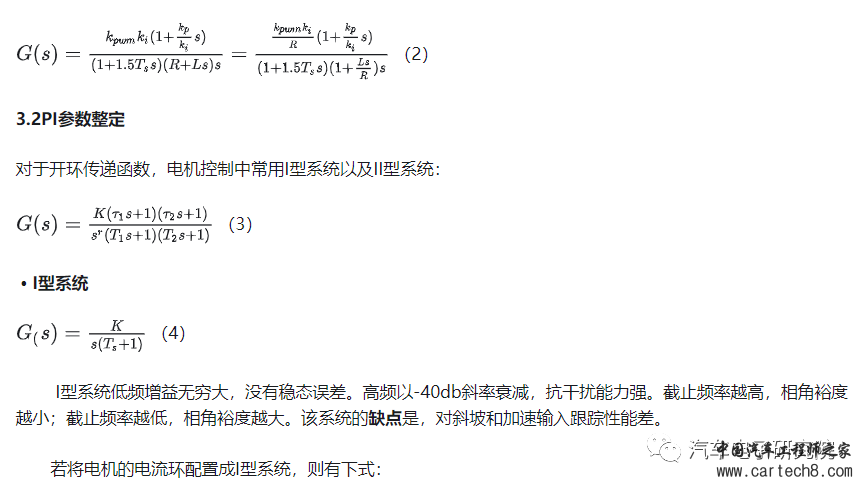
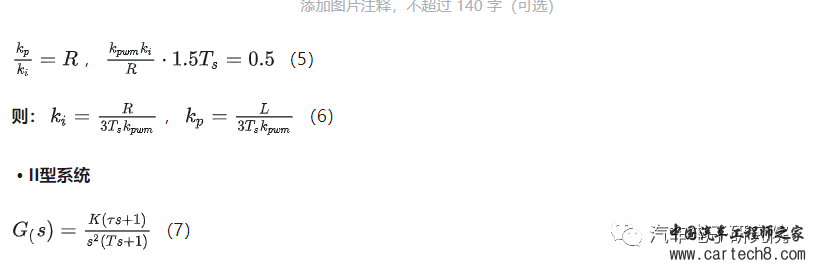
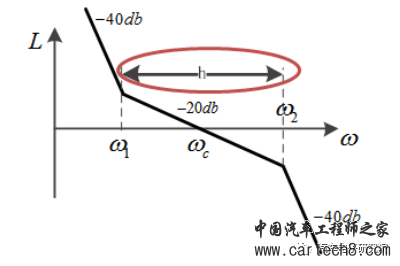
II型系统能精确跟踪斜坡输入,稳态误差为零,抗干扰性强。
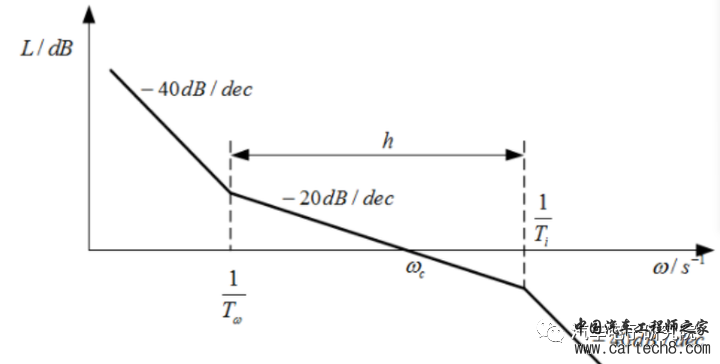
添加图片注释,不超过 140 字(可选)
来源:陈老四
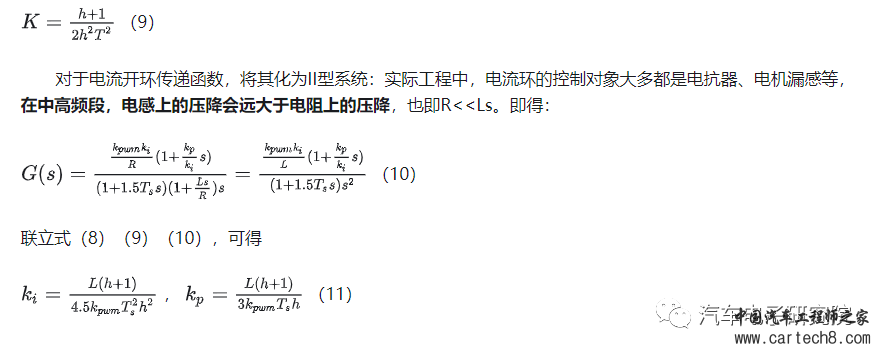
h是斜率为-20dB/dec的中频段的宽度,称为中频宽: ?=?? (8);确定了中频宽h,就确定了τ,再改变K使得幅频特性上下平移,改变ωc。对于确定的h,存在一个确定的K,通过振荡指标法,使得闭环幅频特性峰值最小。K和h的关系为
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 电机(四)——永磁同步电机PI参数调节w10.jpg
电机(四)——永磁同步电机PI参数调节w10.jpg